§ 25. Робототехника. Системы автоматического управления
Во все времена люди пытались представить себе будущее. Писатели-фантасты рассказывали об удивительных городах, машинах, летательных аппаратах и роботах. Подумайте, что такое робот. Что он может делать? Как использование роботов может изменить жизнь людей? Что представляет себе человек, когда звучит слово «робот»?
В современном мире использование роботов стало обыденным явлением. По квартирам ползают роботы-пылесосы. На автомобилях и самолётах автопилоты-роботы ведут управление по круиз-контролю. Готовят пищу роботы-хлебопечки и роботы-мультиварки.
Что такое робот? Какие роботы бывают? Как ими управлять и как создать робота самому? В какой момент наши добрые помощники – пылесос, автомобиль, кофеварка – так поумнели, что превратились из просто агрегатов в наших интеллектуальных друзей? Чем отличается робот от неробота?
Рассмотрим в качестве примера обычную радиоуправляемую машинку (рис. 1). Она не является роботом, так как сможет поехать вперёд-назад и в сторону только после того, как на пульте нажмут рычажок в нужную сторону. Хотя команды движения и приходят на машинку по радиоканалу, но машинка не анализирует ситуацию и не принимает никаких решений.

Рис. 1. Радиоуправляемая машинка
Если рассмотреть управляемый с подобного пульта и тоже по радио каналу квадрокоптер, то его можно считать полноценным роботом (рис. 2). Это связано с тем, что на борту квадрокоптера стоит специальное устройство – чип-микропроцессор, в нём по заранее разработанной и за груженной в запоминающее устройство программе идёт анализ полученных команд, учитывается направление и скорость ветра, появление препятствия, рассчитываются изменения скорости вращения моторов.

Рис. 2. Радиоуправляемый квадрокоптер
Подумаем, когда становится роботом пылесос. Обычный включённый пылесос (рис. 3, а) будет долго шуметь, стоя на одном месте, если его никто никуда не передвинет. Но робот-пылесос в виде таблетки (рис. 3, б) сам передвигается от одной стены комнаты до другой, причём таким образом, что проходит над каждым участком пола не более чем 2–3 раза. Как это он делает? Откуда робот-пылесос берёт координаты и как запоминает свой путь?
 
Рис.3. Пылесос: а - обыкновенный; б - робот-пылесос
Оказывается, что, как и в случае с квадрокоптером, в роботе-пылесосе есть специальные датчики. Они установлены на колёсах, и они называются энкодерами. Эти датчики собирают информацию о движении пылесоса относительно препятствий в комнате. Полученная таким образом информация обрабатывается специальным устройством – центральным процессором пылесоса, в который заложена программа анализа передвижения пылесоса. Робот ползёт и как будто мысленно «закрашивает» часть комнаты, где он уже побывал, а далее, уперевшись в стенку и развернувшись, он прокладывает маршрут по ещё «не закрашенному» пути. И так продолжается до тех пор, пока он не «закрасит» своим следом все свободное пространство либо пока не кончится заряд батареи на его борту.
Итак, робот (чеш. robot, от robota – «подневольный труд») – это такое устройство, которое способно действовать по заложенной в него программе. Слово «робот» было придумано чешским писателем Карелом Чапеком и его братом Йозефом и впервые использовано в пьесе Чапека «Р. У. Р.» («Россумские универсальные роботы», 1920).
Вот как сам Карел Чапек это описывает: – «…в один прекрасный день … автору пришёл в голову сюжет … пьесы. И пока железо было горячо, он прибежал с новой идеей к своему брату Йозефу, художнику, который в это время стоял у мольберта… Автор изложил сюжет так коротко, как только мог…
– „Но я не знаю, – сказал автор, – как мне этих искусственных рабочих назвать. Я бы назвал их лаборжи [по-видимому, от английского слова labour – работники, трудящиеся, рабочая сила], но мне кажется, что это слишком книжно“.
– „Так назови их роботами“, – пробормотал художник, … продолжая грунтовать холст …».
В ранних русских переводах использовалось слово «работарь».
Назначения роботов могут быть самыми разнообразными, от увеселительных и прикладных и до сугубо производственных. Внешний вид роботов также может быть каким угодно, хотя нередко в конструкциях узлов заимствуют элементы анатомии различных живых существ, подходящие для выполняемой задачи.
Настоящий робот – это машина, которую можно обучить, т. е. подобно компьютеру запрограммировать (задать ему набор действий, которые он должен выполнять) делать разнообразные виды движений, реагировать на изменения в окружающем мире и выполнять множество видов работ и заданий.
Все роботы можно разделить на две большие группы:
• стационарные роботы на фундаменте, которые обычно используются в промышленности, на линиях сборки и сварки кузовных деталей автомобилей;
• мобильные роботы, которые могут перемещаться и выполнять работу везде, куда смогут добраться.
Мобильные роботы различаются по способу передвижения: есть передвигающиеся на колёсах или гусеницах, шагающие, плавающие и летающие.
Роботы могут выполнять различные функции.
Промышленные роботы – это, как правило, мощные роботы-манипуляторы, установленные на неподвижном фундаменте, они способны выполнять действия в радиусе, равном длине их «руки». На конвейере их ставят несколько в ряд, и каждый выполняет определённые операции (рис. 4).

Рис. 4. Сборочная линия с промышленными роботами
Медицинские роботы используются для выполнения хирургических операций, при этом применяются системы дистанционного слежения (рис. 5).
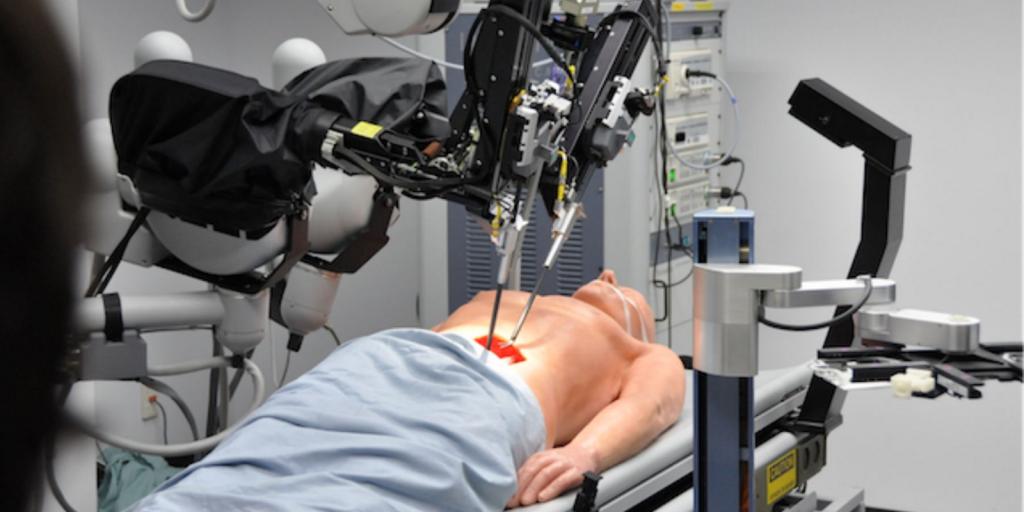
Рис. 5. Использование медицинских роботов в хирургии
К медицинским роботам относятся экзоскелеты, которые помогают людям передвигаться (рис. 6).

Рис. 6. Люди, использующие экзоскелеты
Роботы могут быть использованы в качестве протезов рук. Управлять электронными мышцами возможно уже сейчас, снимая датчиками сигналы с мышц человеческого тела. Наука, занимающаяся подобными проблемами, называется бионика.
Сельскохозяйственные роботы используются в растениеводстве и животноводстве (рис. 7). Они помогают кормить животных, удобрять и поливать растения, возделывать почву.

Рис. 7. Роботы, используемые в растениеводстве
Подводные роботы используются в морском деле для проведения аварийно-спасательных работ и различных исследований на дне моря (рис. 8).

Рис. 8. Подводный робот
Работа таких роботов осложняется тем, что ими невозможно управлять дистанционно, по радиоканалу. Радиоволны очень плохо распространяются в водной среде, поэтому таких автономных роботов надо заранее тщательно программировать, чтобы они смогли выполнить поставленную задачу и вернуться на базу самостоятельно.
Первым космическим роботом можно считать луноход, отправленный на Луну ещё во времена СССР — в далёком 1970 году (рис. 9)

Рис. 9. Советский луноход
В 2011 году американцами к Марсу был направлен робот «Кьюриосити» (рис. 10), название которого переводится на русский язык как «любознательность». Для него была разработана специальная платформа на реактивных двигателях, которая, подлетев к поверхности Марса, «зависла» над ней, и марсоход очень бережно на лебёдке сам спустился с неё на поверхность.

Рис. 10. Американский марсоход «Кьюриосити»
Робот был отправлен и к комете Чурюмова—Герасименко. Он проводил исследования поверхности в точке высадки, брал пробы грунта и анализировал их прямо на месте, передавая на Землю в цифровом виде данные о составе почвы и поверхности, на которой он работал.
Сервисные роботы помогают нам в повседневной жизни. К ним, например, относится робот-пылесос. В местах большого скопления людей используют роботы телеприсутствия (рис. 11), которые помогают сориентироваться, подсказывают, куда сейчас стоит сходить, и отвечают на вопросы посетителей.
Рис. 11. Робот телеприсутствия
В школе такие роботы телеприсутствия помогут ребятам, которые не пришли в школу, почувствовать себя в коллективе, побродить на переменке по коридорам, пообщаться с друзьями, получить задания на дом или пойти с одноклассниками в музей (рис. 12).

Рис. 12. Робот в музее
Самым известным шагающим сервисным роботом является японский робот Асимо (рис. 13). Такие роботы уже используются в некоторых кафе как разносчики заказанной еды.
Рис. 13. Японский робот Асимо
К сервисным роботам можно отнести систему круиз-контроля в автомобилях. Причём если раньше такие системы только поддерживали определённую скорость при движении по трассе, то сейчас появились значительно более умные системы круиз-контроля, которые определяют ещё и расстояние до идущего впереди автомобиля и позволяют двигаться со скоростью, задаваемой лидером в колонне.
В роботе, как и в любом компьютере, есть центральный процессор (чип), постоянная память и оперативная память. Центральный процессор – это «мозг» компьютера, устройство для обработки информации. Постоянная память, или постоянное запоминающее устройство (ПЗУ), используется для хранения неизменяемых данных в компьютере. Она способна хранить данные даже тогда, когда нет энергопитания компьютера. Оперативная память, или оперативное запоминающее устройство (ОЗУ), – это та часть компьютерной памяти, в которой во время работы компьютера хранится выполняемая программа и все данные, обрабатываемые процессором. ОЗУ – это энергозависимая часть компьютерной памяти.
Программу в робот загружают. Способы загрузки бывают разные, например с помощью специального устройства – программатора – или по радиоканалу. Загрузка программы в постоянную память устройства ещё называется прошивкой устройства.
Когда робот выключен, загруженная в него программа хранится в ПЗУ. Как только на робот подаётся питание, процессор отправляет программу из постоянной в оперативную память и запускает выполнение программы.
Таким образом, роботом называют такое устройство, которое можно запрограммировать на выполнение каких-то действий.
Роботом можно считать современный гугл-автомобиль , на который уже установлен бортовой вычислительный комплекс и активный круиз-контроль. Такой автомобиль может не только сохранять постоянную скорость на трассе, но и оставлять неизменным расстояние до впереди идущего автомобиля и реагировать в автоматическом режиме на внезапно появляющееся препятствие.
Теперь мы можем определить, чем же отличаются роботы от простых механических устройств или радиоуправляемых игрушек. Итак, в роботах должно быть устройство, которое позволит ему «думать» и каким-то образом «общаться» с человеком. Такое устройство, которое используется для управления в электронике и вычислительной технике, получило название «контроллер». Контроллер – это микросхема, внутри которой находится настоящий компьютер (рис. 14). В контроллере есть всё, что необходимо для самостоятельной работы: процессор, оперативная и постоянная память, порты ввода и вывода, таймеры, многое другое.

Рис. 14. Контроллер
Во все планшеты, телефоны и другие гаджеты встроены контроллеры. Контроллеры отличаются друг от друга размерами, мощностью (которая определяет, какое количество операций может выполняться), рабочей частотой (скоростью выполнения операций).
Главная часть любого контроллера – микропроцессор.
 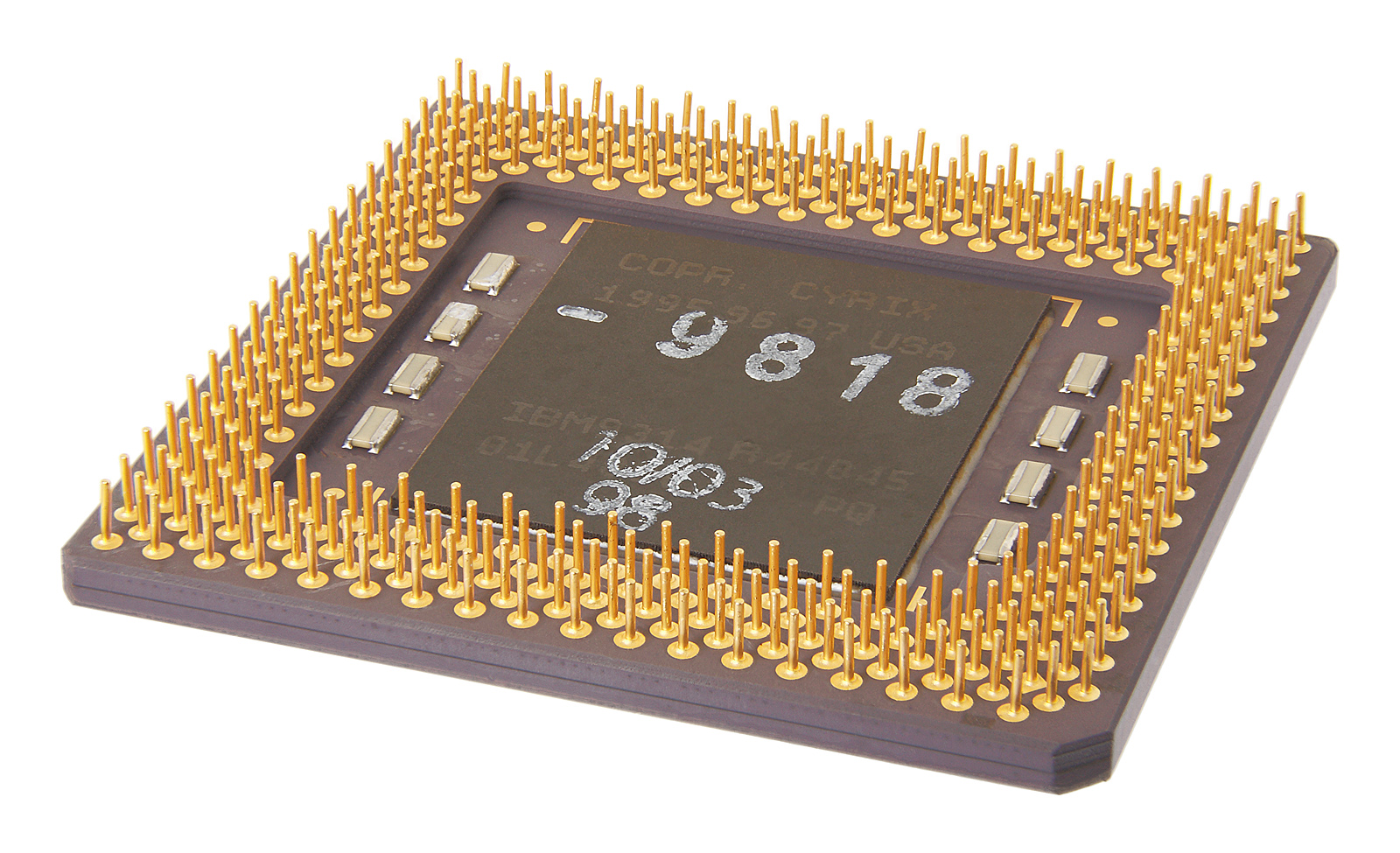
Рис. 15. Микропроцессоры
Это арифметико-логическое устройство, которое производит арифметические и логические операции с двоичными числами (об этом мы будем говорить, когда станем рассматривать команды, которые понимают роботы).
Электроника в робототехнике
Приведите примеры электронных устройств, которыми вы пользуетесь в школе и дома. Как вы думаете, нужна ли для их работы электрическая энергия? Обоснуйте свой ответ.
Рассмотрим самую главную часть любого робота – контроллер.
В качестве индикаторного устройства в современных устройствах часто применяются светодиоды. Светодиод – это электронный прибор, который начинает светиться при прохождении через него электрического тока. Светодиод излучает свет, когда ток протекает от анода, который обозначен знаком «+» (это длинный вывод светодиода), к катоду, который обозначен знаком «–» (короткий вывод). Светодиод обязательно нужно подключать к источнику питания с соблюдением полярности, т. е. «+» светодиода – к «+» источника тока, а «–» светодиода – к «–» источника тока. Раньше светодиоды выпускали только красного и зелёного цветов, затем придумали, как изготавливать светодиоды жёлтого цвета. Но только когда японец Судзи Накамура изобрёл синий светодиод, стало возможно добиться свечения любым цветом.
Основной частью контроллера является микропроцессор. Приставка микро, как вы знаете, означает «маленький».
Рис. 16. Принципиальная схема простейшего процессора
Сейчас процессор такой маленький, что даже в керамическом корпусе имеет размер, сравнимый с размером рисового зёрнышка, несмотря на то, что он состоит из огромного количества электронных компонентов. Принципиальная схема простейшего процессора имеет приблизительно такой вид, как показано на рисунке 16, а он умещается на кончике пальца (рис. 17).

Рис. 17. Микропроцессор и рисовое зернышко
Но процессоры не всегда были маленьких размеров.
Раньше вычислительные машины, выполняющие такие же операции, как микропроцессор, были огромного размера и занимали целый зал (рис. 18).

Рис. 18. Вычислительная машина второй половины XX в.
Основные понятия и термины:
роботы: стационарные, мобильные, промышленные, медицинские, подводные, сельскохозяйственные, космические, сервисные, шагающие, круиз-контроль; микропроцессор, постоянная память, оперативная память, контроллер.
? Вопросы и задания
1. Объясните, чем робот отличается от неробота. Верно ли, что радиоуправляемые игрушки – это настоящие роботы?
2. Какое устройство управляет всеми действиями робота? Для чего нужно большое количество разнообразных контроллеров?
3. Какую систему классификации вы можете предложить для роботов?
4. Каких роботов целесообразно использовать для работы на конвейере автомобильного предприятия (шагающих, стационарных, мобильных)?
5. Какими должны быть подводные роботы: программно управляемыми (автономными) или дистанционно управляемыми? Почему?
6. Что можно считать первым космическим роботом? Какие ещё космические роботы вам известны?
Задание 1
Придумайте и нарисуйте собственного робота. Дайте роботу имя, придумайте, что он будет делать, какие команды он сможет выполнять.
Задание 2
Выберите один из типов роботов и подготовьте доклад о таких роботах.
| 


